STM32手册
本文最后更新于:2025年2月18日 晚上
第一次接触单片机还是在大二那个暑假,初次使用的是Arduino平台,在它上面完成了电子小白-电灯大师-循迹小车的过程,算是初步入门了。但也仅此而已了,虽然后期尝试学习STM32,但都没有很好的坚持下来,平衡小车项目也就此搁置。
如今的我已经初入职场,成为打工牛马,过去五个月一直浑浑噩噩,迷茫。也正是此时,碰上公司裁员。回想自己过去五个月的经历,似乎没有什么收获成长。这份工作能够干多久,下一步又该怎么办?我不知道。不管怎样,只要在制造业继续从业,就免不了要和单片机接触。于是,我决定利用业余时间重拾STM32。相比于STM32在工业界的地位,Arduino更像是给小白提供的一种玩具。本篇博文将会记录我关于STM32的所有学习相关笔记及感想!
1. 初识STM32
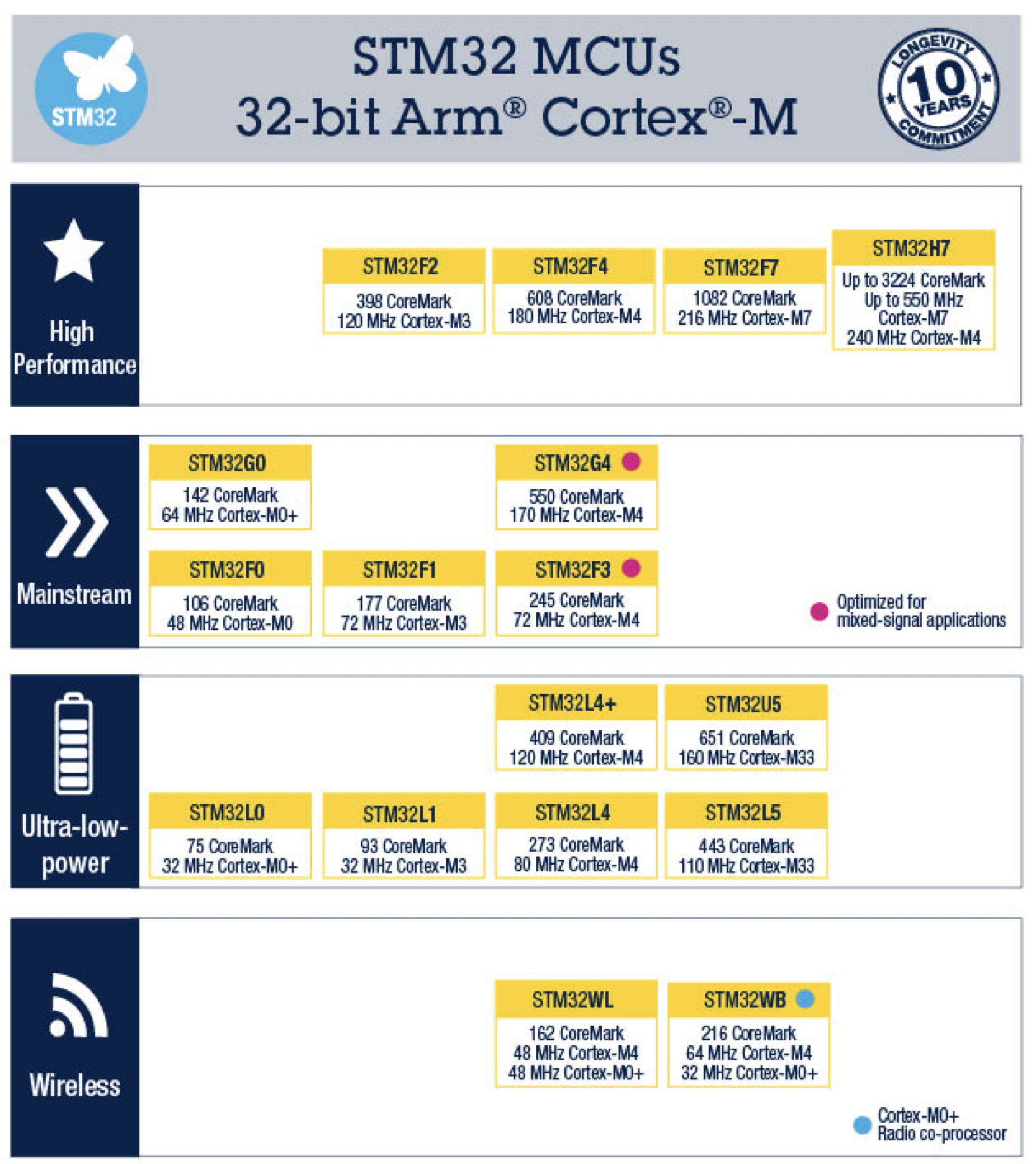
STM32是ST公司基于ARM Cortex-M内核开发的32位微控制器,常应用在嵌入式领域,如智能车、无人机、机器人、无线通信、物联网、工业控制、娱乐电子产品等。STM32系列包括多个子系列,每个子系列针对特定的应用场景和需求进行了优化。
1.1 STM32F103C8T6
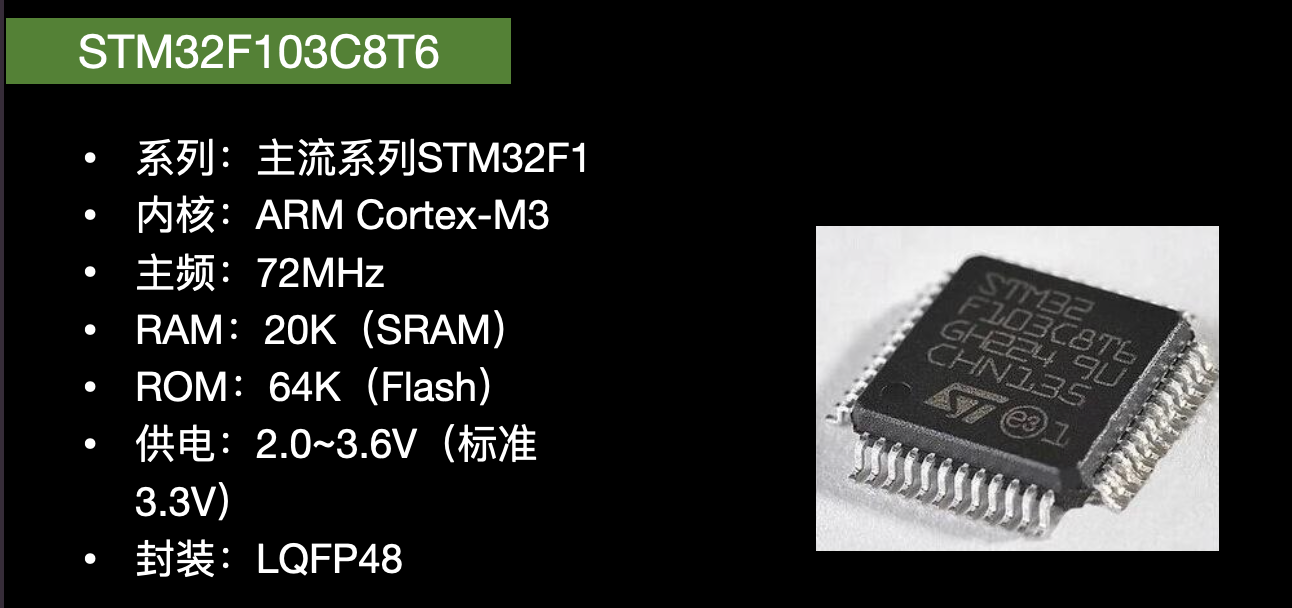
STM32F103C8T6属于STM32F1主流系列,是基于Cortex-M3内核的一款STM32经典处理器,也是大学生用于各类机器人及科技竞赛最常见的MCU。其采用LQFP48封装,主频72MHz,RAM大小20K,ROM大小64K,供电电压为2.0~3.6V。
STM32功能强大、性能优异、片上资源丰富、具有丰富的外设:包括ADC、DAC、定时器、串口、I2C、SPI、USB、以太网、CAN等,支持多种通信和控制接口。

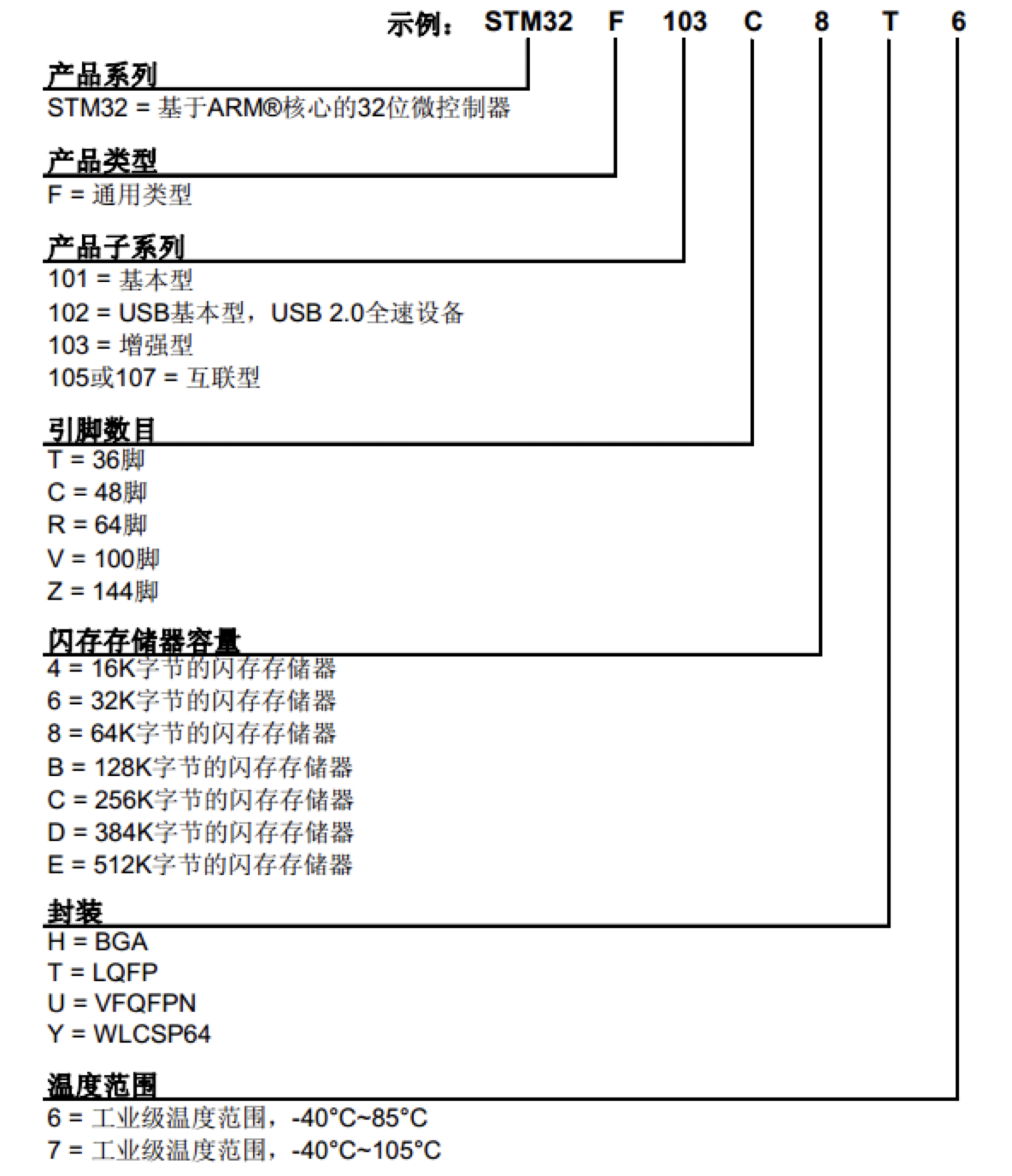
STM产品型号字符均有意义,拿STM32F103C8T6,其每个字符代表如下意义
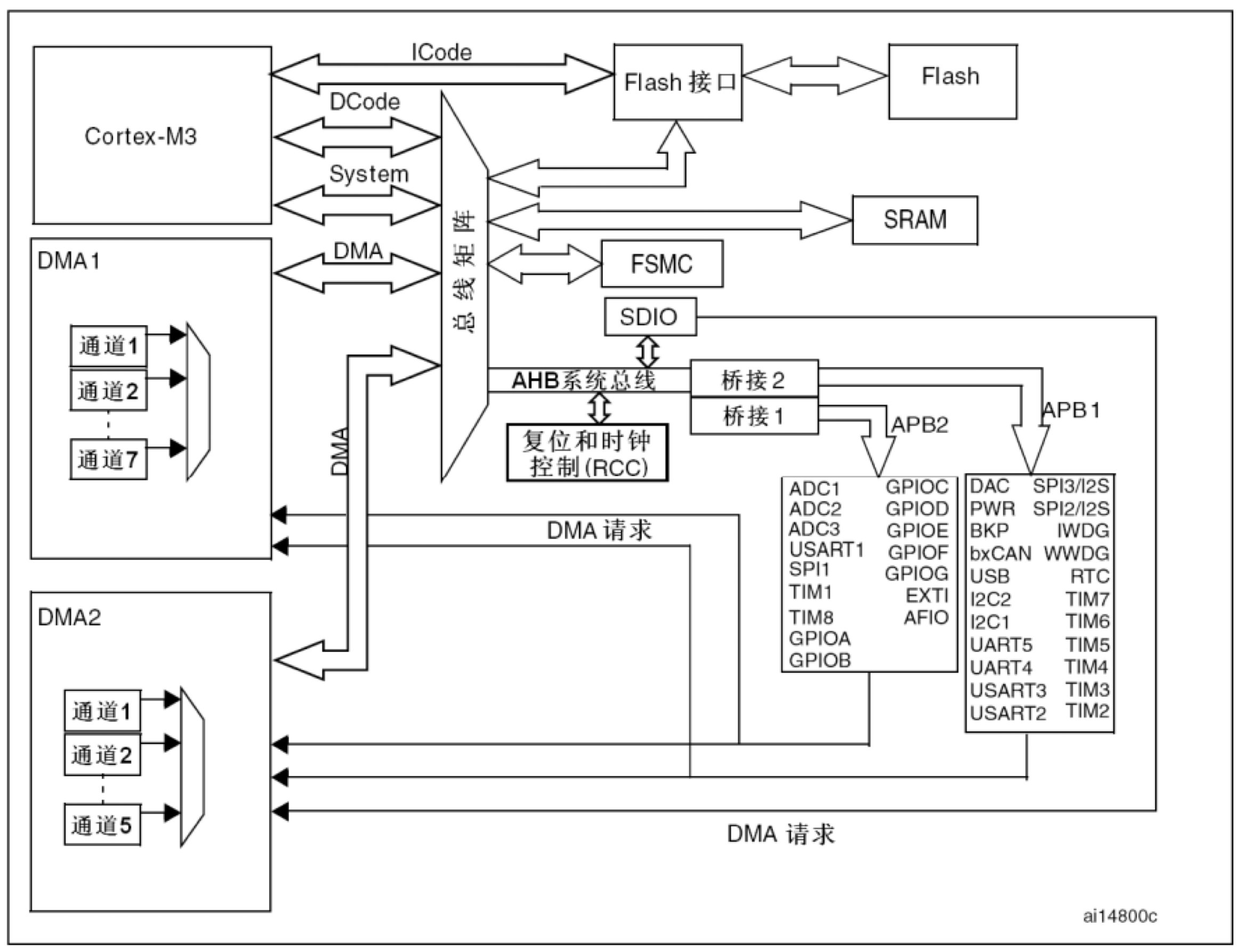
1.2 系统结构
1.3 基本外设
1.3.1 GPIO
GPIO(General Purpose Input Output),中文称为通用输入输出口,CPU可配置利用GPIO实现高低电平信号的输出和读取。STM32的GPIO可配置成八种输入输出模式。输出模式下可控制端口输出高低电平,用以驱动LED、控制蜂鸣器、模拟通信协议输出时序等,输入模式下可读取端口的高低电平或电压,用于读取按键输入、外接模块电平信号输入、ADC电压采集、模拟通信协议接收数据等。
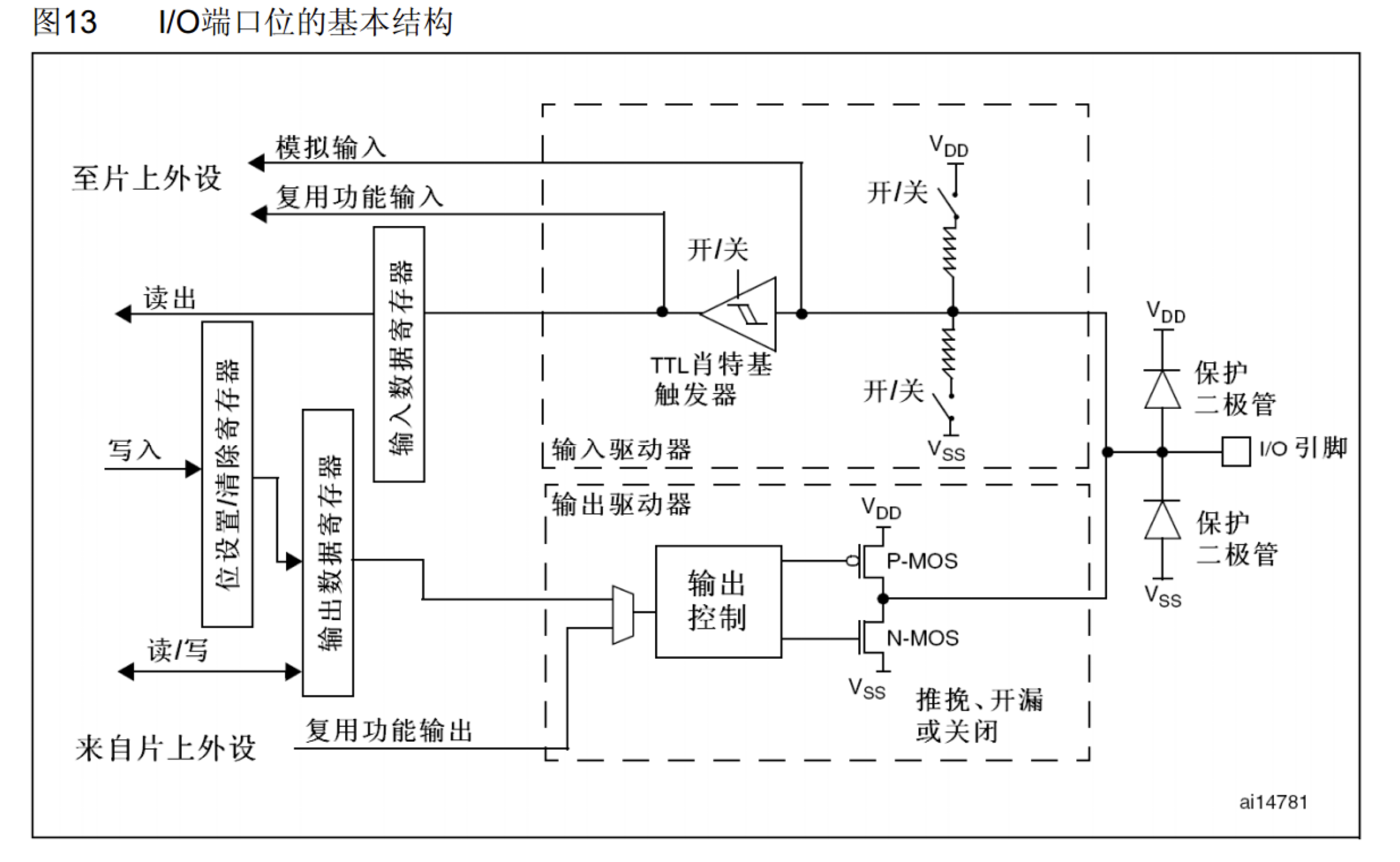
GPIO是由三个寄存器以及“TTL肖特基触发器、二极管、P-MOS管和N-MOS管”组成[1]。输入输出部分是分开的,当GPIO引脚配置为输出模式时,输入电路则不工作
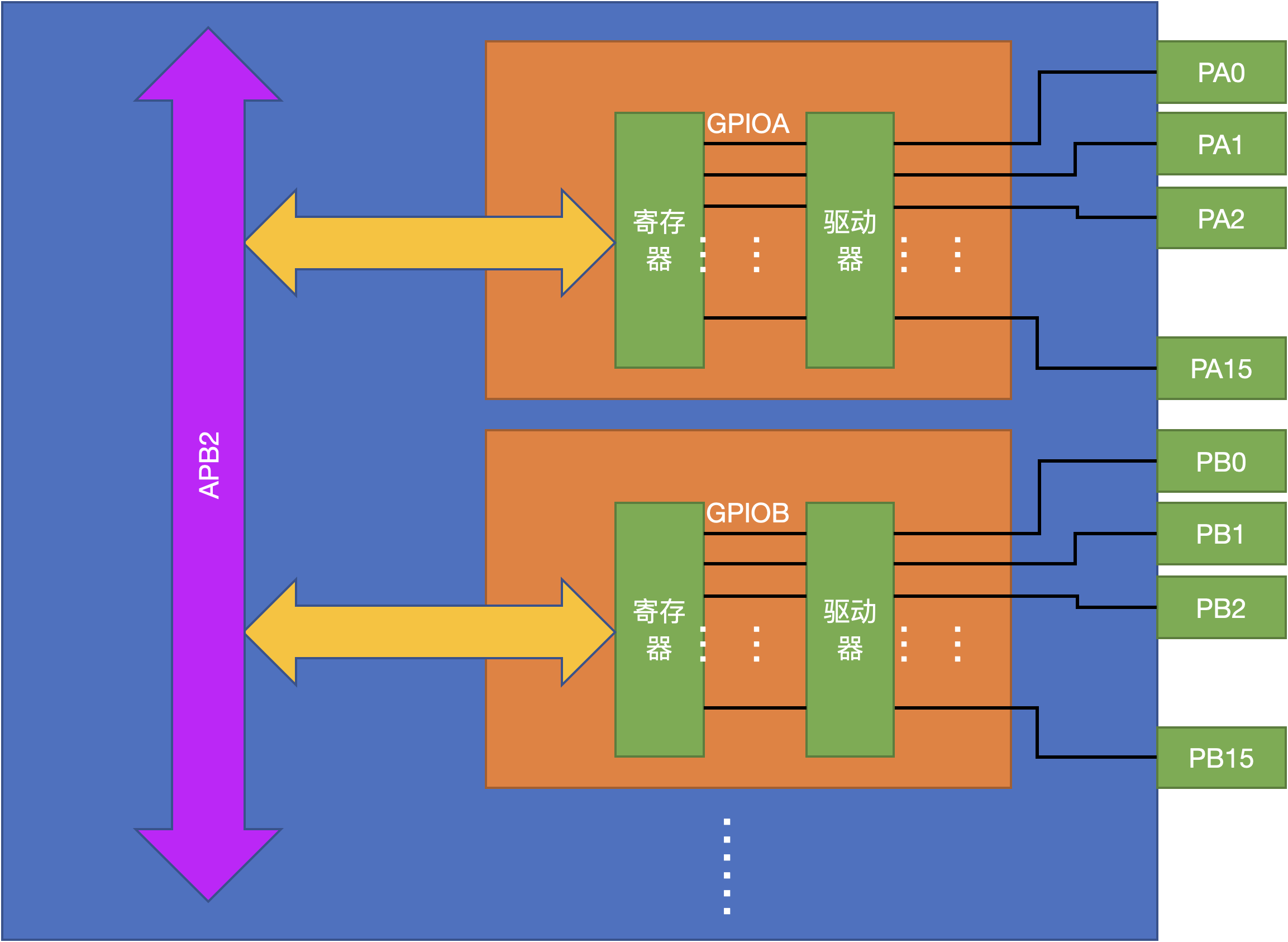
每个GPIO口都有一组引脚连接,并且这组引脚,如PA-PG(引脚编号)连接到GPIOA中,其中有一个引脚的作用是输出,说的直接一点GPIO口是一个可编程的引脚,我们通过对GPIO口里的寄存器进行配置,让CPU对特定的引脚输出高电平。其基本工作流程为:CPU通过APB2总线控制寄存器,驱动器依据寄存器中不同位的内容(0/1)输出高低电平,实现对GPIO的控制。因此,STM32中代码控制GPIO步骤应包含以下几步:
- 开启GPIO对应的总线时钟(这里是APB2);
- 初始化GPIO;
- 控制GPIO;
代码示例:
1 | |
1.3.2 中断
什么是中断
在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续运行
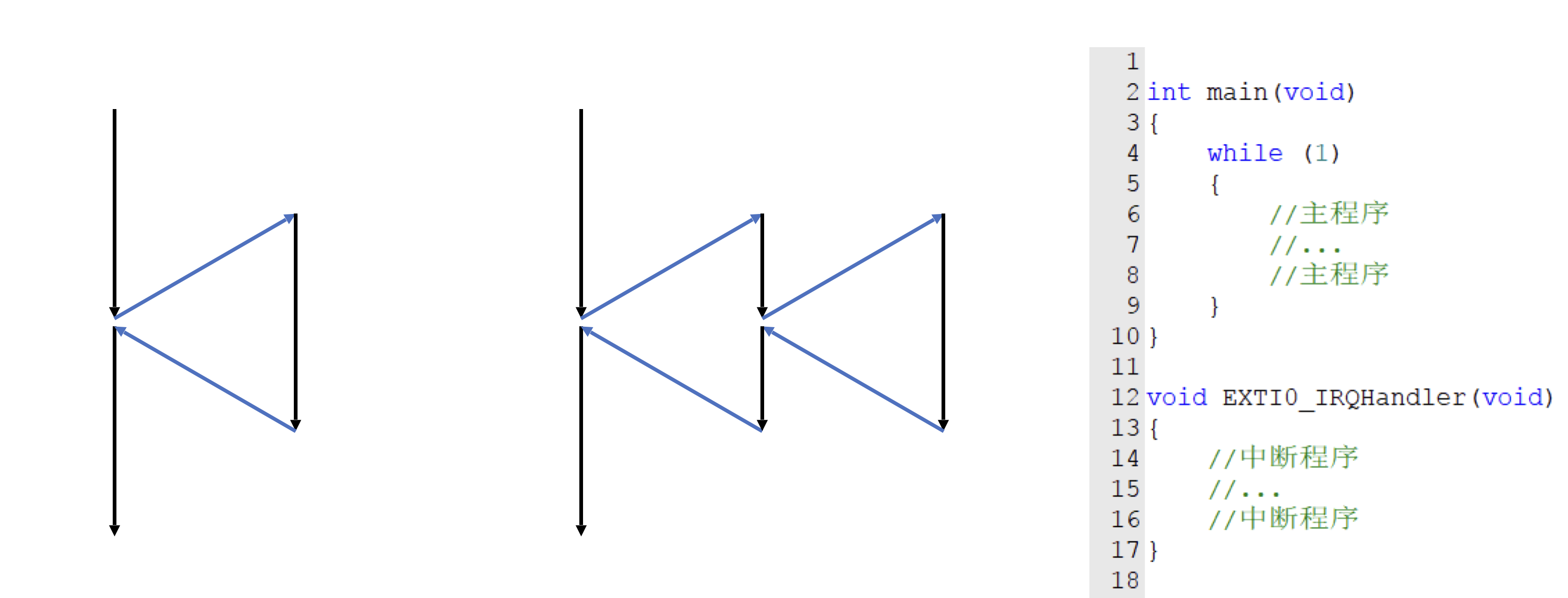
中断具有优先级,当有多个中断源同时申请中断时,CPU会根据中断源的轻重缓急进行裁决,优先响应更加紧急的中断源
中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回
为什么需要中断,优势是什么?
中断机制存在的原因
- 提高系统效率(节省CPU资源) 在计算机系统中,如果没有中断机制,CPU就需要不断地轮询设备状态。例如,CPU要知道打印机是否完成打印任务,如果没有中断,它只能持续地检查打印机的状态寄存器。这会浪费大量的CPU时间,因为在打印机未完成任务的大部分时间里,CPU做的这种轮询是无意义的。而有了中断机制,打印机在完成任务时可以主动向CPU发送中断信号,CPU就可以在这段时间去处理其他更有意义的任务,如运行其他程序或者处理其他设备的请求。
- 实现多任务处理(中断优先级) 现代操作系统支持多任务运行。当多个任务并发执行时,中断机制可以有效地协调各个任务之间的资源分配和执行顺序。比如,当一个任务正在占用CPU执行时,如果有更高优先级的任务需要处理(如实时性很强的网络数据接收任务),可以通过中断机制暂停当前任务,让CPU转而处理更高优先级的任务。这有助于保证系统对各种任务的响应及时性,特别是对于那些对时间敏感的任务,如多媒体播放中的音频视频同步等任务。
- 设备交互需求(避免信息丢失) 计算机系统中有各种各样的外部设备,如鼠标、键盘、硬盘等。这些设备的工作速度与CPU的速度相比非常慢。如果没有中断机制,设备与CPU之间的数据传输就会非常困难。以键盘为例,当用户按下一个键时,键盘需要向CPU发送相应的字符编码。通过中断机制,键盘可以在按键按下时及时通知CPU来读取这个编码,而不需要CPU一直等待键盘输入。
- 异常处理 在程序执行过程中,可能会出现各种异常情况,如除数为零、访问非法内存地址等。中断机制可以将这些异常当作一种特殊的中断(称为异常中断)来处理。当发生这些异常时,系统可以通过中断机制停止当前程序的错误执行,避免系统崩溃,并进行相应的错误处理,如显示错误信息、终止程序或者尝试恢复程序的执行环境等。
中断的优势
- 实时响应性 对于一些实时性要求很高的设备或任务,中断机制提供了很好的解决方案。例如在工业控制领域,传感器检测到危险情况(如温度过高、压力过大等)时,能够立即通过中断通知控制系统采取措施。这种实时响应能力可以避免潜在的危险和损失,因为系统不需要等待CPU的轮询周期才能得到传感器的状态信息。
- 资源利用率提高 由于中断机制避免了CPU的大量无意义轮询,使得CPU能够更多地用于实际的数据处理和任务执行。这提高了整个系统的资源利用率,无论是CPU资源还是其他硬件资源。例如,在一个服务器系统中,通过中断机制可以让CPU更好地处理来自多个客户端的请求,而不会被一些慢速设备(如硬盘读写)的状态查询所浪费时间。
- 增强系统灵活性 中断机制允许不同设备和任务按照各自的需求与CPU进行交互。操作系统可以根据设备的优先级、任务的性质等因素灵活地配置中断相关的参数,如中断向量、中断优先级等。这种灵活性使得系统能够适应不同的应用场景,无论是桌面计算机系统、移动设备还是大型服务器系统。
- 支持异步操作 许多设备的操作是异步的,例如网络数据的接收和发送。中断机制能够很好地处理这种异步操作。当网络接口接收到新的数据时,它可以通过中断通知CPU来处理数据,而不需要CPU一直等待数据的到来。同样,在发送数据时,CPU可以将数据交给网络接口设备后继续执行其他任务,当数据发送完成时由设备通过中断通知CPU。
中断使用场景
单片机中断有多种使用场景,常见的包括以下几种:
- 定时器中断: 精确延时:比如在智能家电中,需要定时开启或关闭某个功能,如空调定时开关机,可通过定时器中断实现精确的时间控制。 周期性任务:在工业自动化生产线上,某些设备需要周期性地进行数据采集或状态检测,定时器中断可确保这些任务按固定时间间隔执行。
- 外部中断: 按键检测:在电子设备中,如手机、遥控器等,按下按键时会产生外部中断,单片机响应中断后执行相应的按键处理程序,实现对应功能,如调整音量、切换频道等。 传感器信号检测:用于检测温度、湿度、压力等传感器的输出信号。当传感器状态变化达到设定阈值时,触发外部中断,单片机进行数据读取和处理,例如在智能家居系统中,根据温度传感器的信号自动控制空调或暖气的运行。
- 串口中断: 数据通信:在需要与外部设备进行数据交互的场景中广泛应用,如计算机与单片机之间的数据传输、单片机与其他嵌入式设备的通信等。当串口接收到数据时,触发中断,单片机及时处理接收的数据,可用于实现实时监控、远程控制等功能,比如在远程监控系统中,单片机通过串口中断接收监控数据并进行处理和传输。
- 软件中断: 系统异常处理:当系统出现故障或异常情况时,如程序运行出错、数据溢出等,可通过软件中断触发相应的异常处理程序,进行错误诊断、记录和恢复操作,以保证系统的稳定性和可靠性。 状态切换:在一些复杂的控制系统中,根据不同的条件和事件需要切换系统的工作状态,软件中断可用于实现这种状态的快速切换,例如在智能交通信号灯控制系统中,根据不同的时间段和交通流量情况,通过软件中断切换信号灯的显示模式。
EXTI(Extern Interrupt)外部中断
EXTI可以监测指定GPIO口的电平信号,当其指定的GPIO口产生电平变化时,EXTI将立即向NVIC发出中断申请,经过NVIC裁决后即可中断CPU主程序,使CPU执行EXTI对应的中断程序
支持的触发方式:上升沿/下降沿/双边沿/软件触发
支持的GPIO口:所有GPIO口,但相同的Pin不能同时触发中断
通道数:16个GPIO_Pin,外加PVD输出、RTC闹钟、USB唤醒、以太网唤醒
触发响应方式:中断响应/事件响应
外部中断的结构
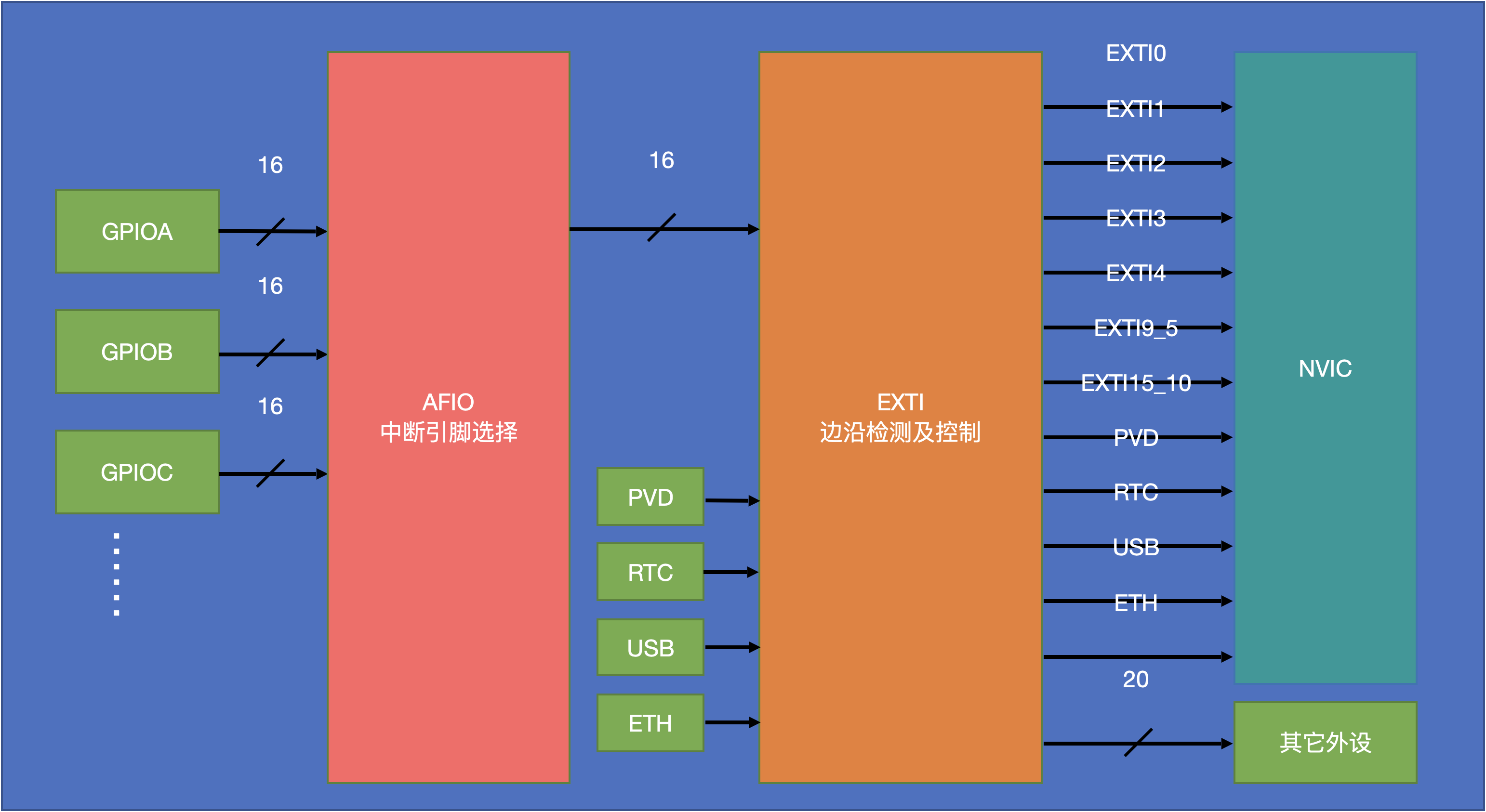
- 整体架构:外部中断的整体结构较为复杂,从左到右依次为 GPIO 口外设、AFIO 中断引脚选择电路模块、EXTI 边缘检测及控制电路,最后分为触发中断和触发事件两路输出。GPIO 口外设有多个,每个外设包含 16 个硬件引脚,这些引脚的信号首先进入 AFIO 选择电路
- AFIO 选择电路:AFIO 主要用于引脚复用功能的选择和定义,在外部中断中,它起到中断引脚选择的关键作用。由于 GPIO 口硬件引脚数量众多,而 EXTI 模块只有 16 个 GPIO 通道,AFIO 通过数据选择器,从多个 GPIO 口的 16 个硬件引脚中选择一个连接到 EXTI 通道,这就解释了为何相同编号的引脚不能同时触发中断
- EXTI 内部电路:经过 AFIO 选择后的 16 个通道信号与其他 4 个特殊功能信号(PVD 输出、RTC 闹钟、USB 唤醒、以太网唤醒)共同组成 EXTI 的 20 个输入信号,进入 EXTI 边缘检测及控制电路。该电路可选择上升沿、下降沿或双边沿触发,触发信号经过或门后兵分两路。一路用于触发中断,会先设置挂起寄存器,通过与中断屏蔽寄存器共同进入与门,决定是否向 NVIC 中断控制器发送中断信号;另一路用于触发事件,经过事件屏蔽寄存器控制后,通过脉冲发生器触发其他外设操作
代码实现:STM32中代码实现外部中断步骤应包含以下几步:
- 开启GPIO对应的总线时钟(这里是APB2);
- 初始化GPIO;
- 开启AFIO时钟;
- 配置EXTI及NVIC;
- 向中断函数中添加中断执行程序;
代码示例:
1 | |
中断的注意事项
- 适用于对通讯频率及实时性有要求的场景,如电机测速、按键识别;
- 避免长/复杂代码,若中断中的代码复杂度较高,执行费时,则可能会导致主程序的阻塞;
- 避免和主函数操作同一硬件