定时器定时中断、编码器及输出比较功能之间的关系
本文最后更新于:2025年5月10日 晚上
一、前言
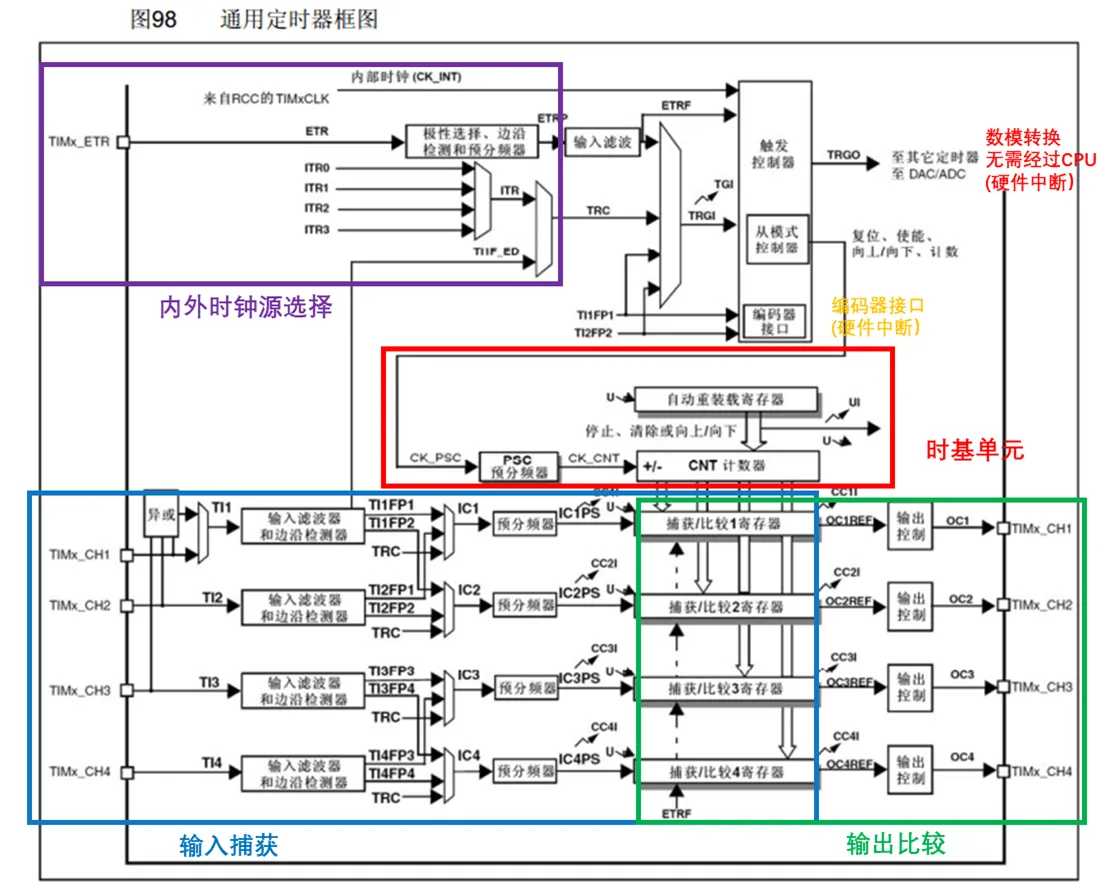
定时器具备基本的定时中断功能,还包含内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等多种功能。输出比较功能可用作PWM信号的输出,编码器接口可用于电机速度及位置的获取。
现有场景需同时对两个编码器直流减速电机速度进行闭环控制。若使用tim实现,则最多需要四个定时器,其中两个定时器输出比较功能用作输出两路pwm,另外两个定时器编码器接口则进行编码器测速。
按照规格书,STM32F103C8T6有1个高级定时器,3个通用定时器。
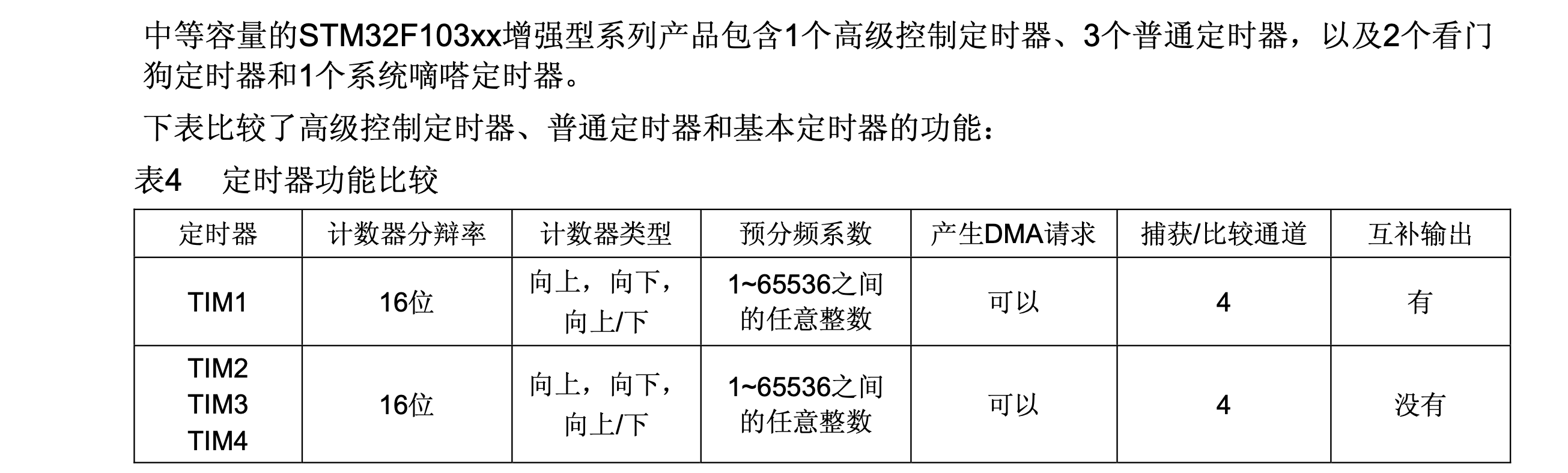
在此工况下,当前的STM32F103C8T63个通用定时器资源显然不够。那么该工况所需的最少定时器资源到底是多少呢?回答这个问题之前,需要思考以下几个问题
- 定时器的各功能之间(编码器、定时中断、输出比较)的使用是否互斥
- 各功能之间的参数是否冲突,之间存在什么关系
- 定时器多功能如何同时实现
二、编码器、定时中断、输出比较功能关系
定时器三种功能(编码器功能、定时中断、输出比较)的基本结构图见下图
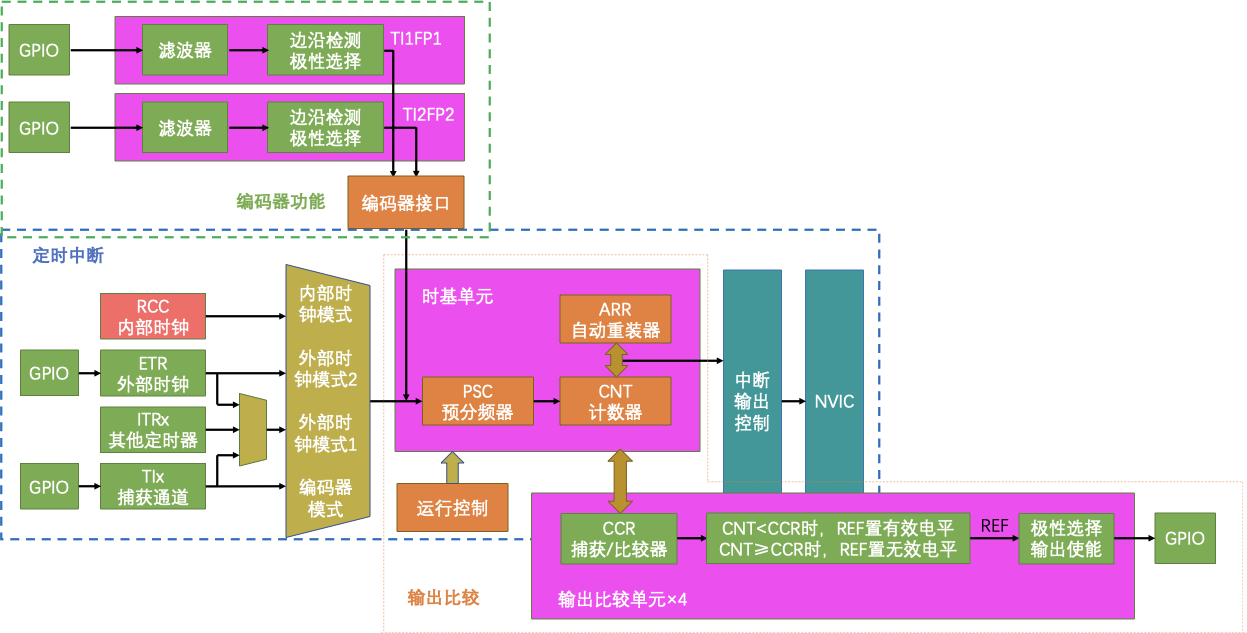
由结构图可明显看到三种功能基本结构都包括时基单元,不同之处在于时基单元的输入与输出
- 编码器功能下,时基单元的输入信号是与编码器接口连接的GPIO输入信号。此时,编码器接口工作时不会使用72MHz内部时钟和时基单元初始化时设置的计数方向,此时计数时钟和计数方向均处于编码器接口托管的状态,计数器的自增和自减受编码器控制。
- 定时中断功能下,时基单元输入来自内部时钟源(内部晶振)产生的方波信号或者外部可作为时钟源设备产生方波信号。
- 输出比较功能下,时基单元输入与定时中断功能相同,既可来自于内部时钟源,也可来自于外部时钟源
由此可见,编码器功能下,时基单元输入受编码器接口托管,其信号来源会与定时中断及输出比较功能信号来源相冲突。因此,一个定时器不可同时开启编码器功能与定时中断及输出比较功能,而定时中断与输出比较功能可同时开启
就参数配置来说,当定时中断与输出比较功能同时开启时,其共用一套时基单元参数。此时定时中断频率与PWM频率相同
\[ Freq=\frac{CK\_PSC}{(PSC+1)(ARR+1)} \]
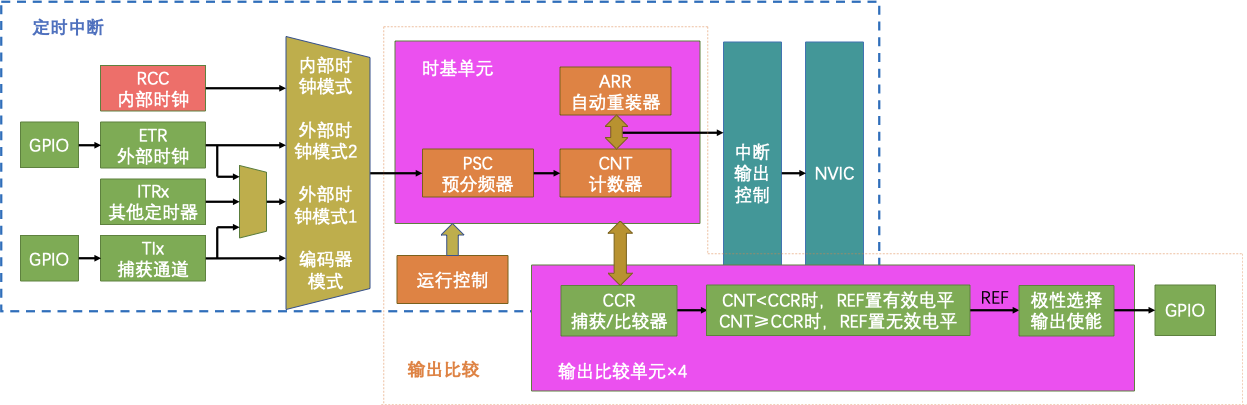
三、定时器定时中断频率与PWM功能的同时实现
当一个定时器可同时开启定时器中断与PWM功能,流程分为时钟源选择、时基单元计数、中断输出配置、输出比较单元配置、GPIO端口配置四个阶段
配置步骤:
- 开启时钟(TIM、GPIO)并配置时钟模式;
- 时基单元初始化及参数配置;
- 中断输出配置;
- 输出比较单元初始化及参数配置;
- GPIO初始化及参数配置;
- 定时器中断使能开启;
1 | |
四、参考资料
- 江科大STM32入门教程
- STM32F10xxx参考手册
- STM32F103xx固件函数库用户手册
定时器定时中断、编码器及输出比较功能之间的关系
https://northfourta.github.io/2025/05/10/%E5%AE%9A%E6%97%B6%E5%99%A8%E5%AE%9A%E6%97%B6%E4%B8%AD%E6%96%AD%E3%80%81%E7%BC%96%E7%A0%81%E5%99%A8%E5%8F%8A%E8%BE%93%E5%87%BA%E6%AF%94%E8%BE%83%E5%8A%9F%E8%83%BD%E4%B9%8B%E9%97%B4%E7%9A%84%E5%85%B3%E7%B3%BB/